باب 06 ریموٹ سینسنگ کا تعارف
انسانی آنکھیں اور فوٹوگرافک نظام دونوں اشیاء کی سطح سے موصول اور منعکس ہونے والی کل توانائی کے ایک چھوٹے سے حصے پر روشنی کا جواب دیتے ہیں۔ دوسری طرف، موجودہ دور کے ریموٹ سینسنگ آلات، 0 کیلون ($-273 \mathrm{C}$) سے زیادہ درجہ حرارت پر تمام اشیاء کی سطحوں سے منعکس/ خارج ہونے والی، جذب ہونے والی اور منتقل ہونے والی تابکاریوں کی بہت وسیع رینج پر رد عمل ظاہر کرتے ہیں۔
ریموٹ سینسنگ کی اصطلاح پہلی بار 1960 کی دہائی کے اوائل میں استعمال ہوئی۔ بعد میں، اس کی تعریف یوں کی گئی کہ یہ وہ کل عمل ہیں جن کے ذریعے اشیاء اور مظاہر کی کسی خاصیت کی معلومات کو ایک ریکارڈنگ آلے (سینسر) کے ذریعے حاصل اور پیمائش کیا جاتا ہے جو زیر مطالعہ اشیاء اور مظاہر سے جسمانی رابطے میں نہیں ہوتا۔ ریموٹ سینسنگ کی مذکورہ بالا تعریف سے یہ بات نوٹ کی جا سکتی ہے کہ اس میں بنیادی طور پر ایک شے کی سطح، ریکارڈنگ آلہ اور معلومات لے جانے والی توانائی کی لہریں شامل ہوتی ہیں (شکل 6.1)۔
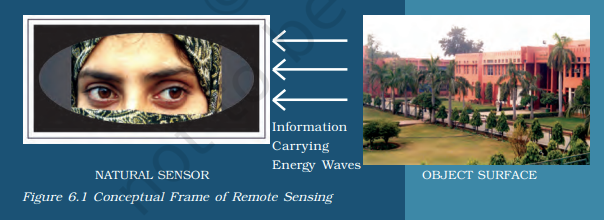
شکل 6.1 ریموٹ سینسنگ کا تصوری فریم
فرہنگ
جذبیت : کسی مادہ کے ذریعہ جذب کی گئی تابکار توانائی اور اسے موصول ہونے والی توانائی کا تناسب۔
بینڈ : برقی مقناطیسی سپیکٹرم میں مخصوص طول موج کا وقفہ۔
ڈیجیٹل امیج : ڈیجیٹل نمبروں (DN) کی ایک ترتیب جو قطاروں اور کالموں میں ترتیب دی گئی ہو، جس میں شدت کی قدر اور ان کے مقامات کی خصوصیت ہو۔
ڈیجیٹل نمبر : ڈیجیٹل امیج میں پکسل کی شدت کی قدر۔
ڈیجیٹل امیج پروسیسنگ : ڈیجیٹل نمبروں کی عددی ہیرا پھیری اس مقصد کے لیے کہ ان کی نمائندگی کرنے والی سطح کے مظاہر کے بارے میں معلومات نکالی جا سکیں۔
برقی مقناطیسی تابکاری : وہ توانائی جو خلا یا کسی واسطے میں روشنی کی رفتار سے پھیلتی ہے۔
برقی مقناطیسی سپیکٹرم : EMR کا تسلسل جو مختصر طول موج، زیادہ فریکوئنسی والی کائناتی تابکاریوں سے لے کر طویل طول موج، کم فریکوئنسی والی ریڈیو لہروں تک پھیلا ہوا ہے۔
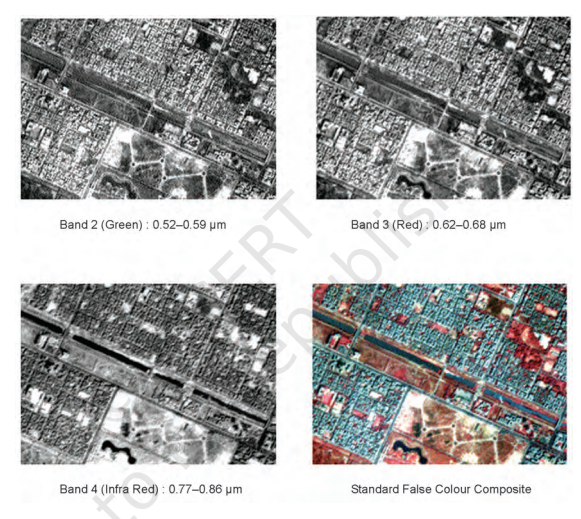
غلط رنگ مرکب : ایک مصنوعی طور پر تیار کردہ رنگین تصویر جس میں نیلا، سبز اور سرخ رنگ ان طول موج کے علاقوں کو تفویض کیے جاتے ہیں جن سے وہ فطرت میں تعلق نہیں رکھتے۔ مثال کے طور پر، ایک معیاری غلط رنگ مرکب میں نیلا رنگ سبز تابکاریوں (0.5 سے $0.6 \mu \mathrm{m}$) کو، سبز رنگ سرخ تابکاریوں ($(0.6$ سے $0.7 \mu \mathrm{m}$) کو اور سرخ رنگ قریبی زیریں سرخ تابکاری (0.7 سے $0.8 \mu \mathrm{m}$) کو تفویض کیا جاتا ہے۔
گرے اسکیل : تصویر کی روشنی میں تغیرات کو معیاری بنانے کا ایک ذریعہ جو سیاہ سے سفید تک درمیانی سرمئی اقدار کے ساتھ ہوتا ہے۔
تصویر : کسی منظر کا مستقل ریکارڈ جس میں قدرتی اور انسانی ساختہ خصوصیات اور سرگرمیاں شامل ہوں، جو فوٹوگرافک اور غیر فوٹوگرافک ذرائع سے تیار کیا گیا ہو۔
منظر : زمین کا وہ علاقہ جو کسی تصویر یا فوٹوگراف کے ذریعے احاطہ کیا گیا ہو۔
سینسر : کوئی بھی امیجنگ یا غیر امیجنگ آلہ جو EMR وصول کرتا ہے اور اسے ایک سگنل میں تبدیل کرتا ہے جسے ریکارڈ کیا جا سکتا ہے اور فوٹوگرافک یا ڈیجیٹل امیج کے طور پر ظاہر کیا جا سکتا ہے۔
انعکاسیت : کسی مادہ کے ذریعہ منعکس کی گئی تابکار توانائی اور اسے موصول ہونے والی توانائی کا تناسب۔
سپیکٹرل بینڈ : مسلسل سپیکٹرم میں طول موجوں کی حد، جیسے کہ سبز بینڈ 0.5 سے $.6 \mu$ تک اور NIR بینڈ کی حد 0.7 سے $1.1 \mu$ تک ہوتی ہے۔
ریموٹ سینسنگ کے مراحل
شکل 6.2 ریموٹ سینسنگ ڈیٹا حصول میں استعمال ہونے والے عمل کو دکھاتی ہے۔ یہ بنیادی عمل جو زمین کی سطح کی اشیاء اور مظاہر کی خصوصیات کے بارے میں معلومات کے جمع کرنے میں مدد کرتے ہیں، درج ذیل ہیں:
(الف) توانائی کا ماخذ (سورج/خود اخراج)؛ (ب) توانائی کا ماخذ سے زمین کی سطح تک انتقال؛ (ج) زمین کی سطح کے ساتھ توانائی کا تعامل؛ (د) منعکس/ خارج ہونے والی توانائی کا فضا کے ذریعے انتشار؛ (ہ) منعکس/ خارج ہونے والی توانائی کا سینسر کے ذریعے پتہ لگانا؛ (و) موصول ہونے والی توانائی کا فوٹوگرافک/ڈیجیٹل ڈیٹا کی شکل میں تبدیل ہونا؛ (ز) ڈیٹا مصنوعات سے معلومات کے مواد کا استخراج؛ اور (ح) معلومات کا نقشہ/جدولی شکلوں میں تبدیل ہونا۔

شکل 6.2 ریموٹ سینسنگ ڈیٹا حصول کے مراحل
الف۔ توانائی کا ماخذ: ریموٹ سینسنگ میں استعمال ہونے والا سب سے اہم توانائی کا ماخذ سورج ہے۔ توانائی مصنوعی طور پر بھی پیدا کی جا سکتی ہے اور اشیاء اور مظاہر کے بارے میں معلومات جمع کرنے کے لیے استعمال کی جا سکتی ہے، جیسے کہ فلیش گنز یا ریڈار (ریڈیو ڈیٹیکشن اینڈ رینجنگ) میں استعمال ہونے والی توانائی کی شعاعیں۔
ب۔ توانائی کا ماخذ سے زمین کی سطح تک انتقال: جو توانائی ماخذ سے نکلتی ہے، وہ ماخذ اور شے کی سطح کے درمیان توانائی کی لہروں کی شکل میں روشنی کی رفتار ($(300,000 \mathrm{~km}$ فی سیکنڈ) سے پھیلتی ہے۔ توانائی کے اس طرح کے انتشار کو برقی مقناطیسی تابکاری کہا جاتا ہے۔ توانائی کی لہریں سائز اور فریکوئنسی میں مختلف ہوتی ہیں۔ اس طرح کے تغیرات کی پلاٹنگ کو برقی مقناطیسی سپیکٹرم کہا جاتا ہے (شکل 6.3)۔ لہروں کے سائز اور فریکوئنسی کی بنیاد پر، توانائی کی لہروں کو گاما، ایکس رے، بالائے بنفشی شعاعیں، مرئی شعاعیں، زیریں سرخ شعاعیں، مائیکرو ویوز اور ریڈیو لہروں میں گروپ کیا جاتا ہے۔ سپیکٹرم کے ان وسیع علاقوں میں سے ہر ایک مختلف اطلاقات میں استعمال ہوتا ہے۔ تاہم، ریموٹ سینسنگ میں توانائی کے مرئی، زیریں سرخ اور مائیکرو ویو علاقے استعمال ہوتے ہیں۔

شکل 6.3 برقی مقناطیسی سپیکٹرم
ج۔ زمین کی سطح کے ساتھ توانائی کا تعامل: پھیلتی ہوئی توانائی آخر کار زمین کی سطح کی اشیاء کے ساتھ تعامل کرتی ہے۔ اس کے نتیجے میں اشیاء سے توانائی کا جذب، انتقال، عکس یا اخراج ہوتا ہے۔ ہم سب جانتے ہیں کہ تمام اشیاء اپنے ترکیب، ظاہری شکلوں اور دیگر خصوصیات میں مختلف ہوتی ہیں۔ لہذا، اشیاء کا انہیں موصول ہونے والی توانائی کے لیے رد عمل بھی یکساں نہیں ہوتا۔ اس کے علاوہ، ایک خاص شے بھی سپیکٹرم کے مختلف علاقوں میں موصول ہونے والی توانائی کے لیے مختلف رد عمل ظاہر کرتی ہے (شکل 6.5)۔ مثال کے طور پر، تازہ پانی کا جسم سپیکٹرم کے سرخ اور زیریں سرخ علاقوں میں زیادہ توانائی جذب کرتا ہے اور سیٹلائٹ امیج میں تاریک/سیاہ دکھائی دیتا ہے جبکہ گدلا پانی کا جسم سپیکٹرم کے نیلے اور سبز علاقوں میں زیادہ عکس کرتا ہے اور ہلکے ٹون میں دکھائی دیتا ہے (شکل 6.4)۔

شکل 6.4 مٹی، نباتات اور پانی کی سپیکٹرل سگنیچر

شکل 6.5 سانبھر جھیل، راجستھان کی آئی آر ایس 1 سی بینڈ 1 سبز (بائیں) اور بینڈ 4 آئی آر امیجز
د۔ منعکس/ خارج ہونے والی توانائی کا فضا کے ذریعے انتشار: جب توانائی زمین کی سطح کی اشیاء سے منعکس ہوتی ہے، تو وہ دوبارہ فضا میں داخل ہوتی ہے۔ آپ اس حقیقت سے واقف ہوں گے کہ فضا میں گیسوں، پانی کے مالیکیولز اور دھول کے ذرات شامل ہوتے ہیں۔ اشیاء سے منعکس ہونے والی توانائی فضا کے اجزاء کے ساتھ رابطے میں آتی ہے اور اصل توانائی کی خصوصیات میں تبدیلی آ جاتی ہے۔ جبکہ کاربن ڈائی آکسائیڈ ($\left(\mathrm{CO}_{2}\right)$) اور ہائیڈروجن ($(\mathrm{H})$)، اور پانی کے مالیکیول درمیانی زیریں سرخ علاقے میں توانائی جذب کرتے ہیں، دھول کے ذرات نیلی توانائی کو منتشر کرتے ہیں۔ لہذا، وہ توانائی جو فضا کے اجزاء کے ذریعہ یا تو جذب ہو جاتی ہے یا منتشر ہو جاتی ہے، سیٹلائٹ پر نصب سینسر تک کبھی نہیں پہنچتی اور ایسی توانائی کی لہروں کے ذریعے لائی جانے والی اشیاء کی خصوصیات غیر ریکارڈ شدہ رہ جاتی ہیں۔
ہ۔ منعکس/ خارج ہونے والی توانائی کا سینسر کے ذریعے پتہ لگانا: جو سینسر انہیں موصول ہونے والی توانائی کو ریکارڈ کرتے ہیں، انہیں تقریباً قطب شمالی سورج ہم وقت ساز مدار میں $700-900 \mathrm{~km}$ کی بلندی پر رکھا جاتا ہے۔ ان سیٹلائٹس کو ریموٹ سینسنگ سیٹلائٹس کہا جاتا ہے (مثلاً انڈین ریموٹ سینسنگ سیریز)۔ ان سیٹلائٹس کے برعکس، موسم کی نگرانی اور ٹیلی کمیونیکیشن سیٹلائٹس کو ایک جیو اسٹیشنری پوزیشن (سیٹلائٹ ہمیشہ اپنے مدار پر اس طرح پوزیشنڈ ہوتا ہے جو زمین کی گردش کی سمت کے ساتھ ہم وقت ساز ہو) میں رکھا جاتا ہے اور تقریباً $36,000 \mathrm{~km}$ کی بلندی پر زمین کے گرد گھومتا ہے (مثلاً INSAT سیریز کے سیٹلائٹ)۔ ریموٹ سینسنگ اور موسم کی نگرانی کرنے والے سیٹلائٹس کے درمیان موازنہ باکس (6.1) میں دیا گیا ہے۔ شکل 6.6 بالترتیب سن سنکرونس اور جیو اسٹیشنری سیٹلائٹس کے مدار دکھاتی ہے۔
باکس 6.1 سن سنکرونس اور جیو اسٹیشنری سیٹلائٹس کے درمیان موازنہ
| مداری | سن سنکرونس | جیو اسٹیشنری |
|---|---|---|
| خصوصیات | سیٹلائٹس | سیٹلائٹس |
| بلندی | $700-900 \mathrm{~km}$ | $@ 36,000 \mathrm{~km}$ |
| کوریج | $81^{\circ} \mathrm{N}$ سے $81^{\circ} \mathrm{S}$ | $1 / 3^{\text {rd }}$ گلوب |
| مداری دورانیہ | $@ 14$ روزانہ مدار | 24 گھنٹے |
| ریزولوشن | عمدہ | کھردرا |
| ($(182$ میٹر سے 1 میٹر) | $(1 \mathrm{~km} \times 1 \mathrm{~km})$ | |
| استعمال | زمینی وسائل | ٹیلی کمیونیکیشن |
| اطلاقات | اور موسم کی نگرانی |

شکل 6.6 سن سنکرونس (بائیں) اور جیو اسٹیشنری (دائیں) سیٹلائٹس کا مدار
ریموٹ سینسنگ سیٹلائٹس ایسے سینسرز سے لیس ہوتے ہیں جو اشیاء سے منعکس ہونے والی EMR جمع کرنے کی صلاحیت رکھتے ہیں۔ فوٹوگرافک کیمرا ایکسپوژر کے لمحے میں فوٹوگراف حاصل کرتا ہے۔ تاہم، ریموٹ سینسنگ سیٹلائٹس میں استعمال ہونے والے سینسرز میں ایک میکانزم ہوتا ہے جو معلومات جمع کرنے اور ریکارڈ کرنے میں فوٹوگرافک کیمرے سے مختلف ہوتا ہے۔ خلائی سینسرز کے ذریعے حاصل کی گئی تصاویر ڈیجیٹل فارمیٹ میں ہوتی ہیں جبکہ کیمرہ پر مبنی نظام کے ذریعے حاصل ہونے والا فوٹوگرافک فارمیٹ ہوتا ہے۔
و۔ موصول ہونے والی توانائی کا فوٹوگرافک/ڈیجیٹل ڈیٹا کی شکل میں تبدیل ہونا: سینسر کے ذریعے موصول ہونے والی تابکاریاں الیکٹرانک طور پر ڈیجیٹل امیج میں تبدیل ہو جاتی ہیں۔ اس میں ڈیجیٹل نمبر شامل ہوتے ہیں جو قطاروں اور کالموں میں ترتیب دیے جاتے ہیں۔ ان نمبروں کو اینالاگ (تصویری) شکل کے ڈیٹا پروڈکٹ میں بھی تبدیل کیا جا سکتا ہے۔ زمین کے مدار میں گردش کرنے والے سیٹلائٹ پر نصب سینسر جمع کردہ امیج ڈیٹا کو دنیا کے مختلف حصوں میں واقع زمینی وصولی اسٹیشن پر الیکٹرانک طور پر منتقل کرتا ہے۔ ہندوستان میں، ایسا ایک اسٹیشن حیدرآباد کے قریب شاد نگر میں واقع ہے۔
ز۔ ڈیٹا مصنوعات سے معلومات کے مواد کا استخراج: زمینی اسٹیشن پر امیج ڈیٹا موصول ہونے کے بعد، اسے امیج ڈیٹا جمع کرنے کے دوران پیدا ہونے والی غلطیوں کے خاتمے کے لیے پروسیس کیا جاتا ہے۔ ایک بار جب تصویر درست ہو جاتی ہے، تو معلومات کا استخراج ڈیجیٹل امیجز سے ڈیجیٹل امیج پروسیسنگ تکنیکوں کا استعمال کرتے ہوئے اور اینالاگ شکل کے ڈیٹا پروڈکٹس سے بصری تشریح کے طریقے لاگو کر کے کیا جاتا ہے۔
ح۔ معلومات کا نقشہ/جدولی شکلوں میں تبدیل ہونا: تشریح شدہ معلومات کو آخر میں بیان کیا جاتا ہے اور تھیمیٹک نقشوں کی مختلف تہوں میں تبدیل کیا جاتا ہے۔ اس کے علاوہ، جدولی ڈیٹا تیار کرنے کے لیے مقداری اقدامات بھی کیے جاتے ہیں۔
سینسرز
سینسر ایک ایسا آلہ ہے جو برقی مقناطیسی تابکاری جمع کرتا ہے، اسے سگنل میں تبدیل کرتا ہے اور اسے زیر تحقیق اشیاء کے بارے میں معلومات حاصل کرنے کے لیے موزوں شکل میں پیش کرتا ہے۔ ڈیٹا آؤٹ پٹ کی شکل کی بنیاد پر، سینسرز کو فوٹوگرافک (اینالاگ) اور غیر فوٹوگرافک (ڈیجیٹل) سینسرز میں درجہ بندی کیا جاتا ہے۔
ایک فوٹوگرافک سینسر (کیمرا) ایکسپوژر کے لمحے میں اشیاء کی تصاویر ریکارڈ کرتا ہے۔ دوسری طرف، ایک غیر فوٹوگرافک سینسر بٹ بائی بٹ شکل میں اشیاء کی تصاویر حاصل کرتا ہے۔ ان سینسرز کو اسکینر کہا جاتا ہے۔ موجودہ باب میں، ہم خود کو سیٹلائٹ ریموٹ سینسنگ میں استعمال ہونے والے غیر فوٹوگرافک سینسرز کی وضاحت کرنے تک محدود رکھیں گے۔
ملٹی سپیکٹرل اسکینرز: سیٹلائٹ ریموٹ سینسنگ میں، ملٹی سپیکٹرل اسکینرز کو سینسر کے طور پر استعمال کیا جاتا ہے۔ یہ سینسرز میدانِ نظر میں جھاڑو دیتے ہوئے اشیاء کی تصاویر حاصل کرنے کے لیے ڈیزائن کیے گئے ہیں۔ ایک اسکینر عام طور پر ایک آئینے اور ڈیٹیکٹرز پر مشتمل وصولی نظام سے بنا ہوتا ہے۔ ایک اسکیننگ سینسر اسکین لائنز کی ایک سیریز ریکارڈ کر کے منظر تشکیل دیتا ہے۔ ایسا کرتے ہوئے، موٹر ڈیوائس اسکیننگ آئینے کو سینسر کے زاویائی میدانِ نظر کے ذریعے ہلاتی ہے، جو اسکین لائنز کی لمبائی کا تعین کرتی ہے اور اسے سواتھ کہا جاتا ہے۔ ایسی ہی وجوہات کی بنا پر اسکینرز کے ذریعے تصاویر جمع کرنے کے طریقہ کار کو بٹ بائی بٹ کہا جاتا ہے۔ ہر منظر خلیوں پر مشتمل ہوتا ہے جو کسی تصویر کے مکانی ریزولوشن کا تعین کرتے ہیں۔ منظر کے پار اسکیننگ آئینے کے جھولنے سے موصول ہونے والی توانائی ڈیٹیکٹرز کی طرف ہدایت کی جاتی ہے، جہاں اسے برقی سگنلز میں تبدیل کیا جاتا ہے۔ ان سگنلز کو مزید عددی اقدار میں تبدیل کیا جاتا ہے جنہیں ڈیجیٹل نمبر کہا جاتا ہے تاکہ میگنیٹک ٹیپ پر ریکارڈ کیا جا سکے۔
ملٹی سپیکٹرل اسکینرز درج ذیل اقسام میں تقسیم ہیں:
(i) وِسک بروم اسکینرز (ii) پش بروم اسکینرز
(i) وِسک بروم اسکینرز : وِسک بروم اسکینرز ایک گھومنے والے آئینے اور ایک واحد ڈیٹیکٹر سے بنے ہوتے ہیں۔ آئینہ اس طرح سے ترتیب دیا جاتا ہے کہ جب یہ ایک چکر مکمل کرتا ہے، تو ڈیٹیکٹر میدانِ نظر میں جھاڑو دیتا ہے۔

6.7 وِسک بروم اسکینرز

6.8 پش بروم اسکینرز
90 اور 120 ڈگری کے درمیان، سپیکٹرم کے مرئی سے درمیانی زیریں سرخ علاقوں تک بڑی تعداد میں تنگ سپیکٹرل بینڈز میں تصاویر حاصل کرنے کے لیے۔ جھولتے ہوئے سینسر کی کل حد کو اسکینر کا کل میدانِ نظر کہا جاتا ہے۔ پورے میدان کو اسکین کرتے ہوئے، سینسر کا آپٹیکل ہیڈ ہمیشہ ایک خاص پیمانے پر رکھا جاتا ہے جسے فوری میدانِ نظر کہا جاتا ہے۔ شکل 6.7 وِسک بروم اسکینرز کے اسکیننگ میکانزم کو دکھاتی ہے۔
(ii) پش بروم اسکینرز: پش بروم اسکینرز میں ڈیٹیکٹرز کی ایک بڑی تعداد ہوتی ہے جو سینسر کے سواتھ کو مکانی ریزولوشن کے سائز سے تقسیم کرنے پر حاصل ہونے والی تعداد کے برابر ہوتی ہے (شکل 6.8)۔ مثال کے طور پر، فرانسیسی ریموٹ سینسنگ سیٹلائٹ SPOT کے ہائی ریزولوشن وزیبل ریڈیومیٹر - 1 کا سواتھ $60 \mathrm{~km}$ ہے اور مکانی ریزولوشن 20 میٹر ہے۔ اگر ہم $60 \mathrm{~km} \times 1000$ میٹر کو $/ 20$ میٹر سے تقسیم کریں، تو ہمیں 3000 ڈیٹیکٹرز کی تعداد ملتی ہے جو SPOT HRV - 1 سینسر میں تعینات کیے گئے ہیں۔ پش بروم اسکینر میں، تمام ڈیٹیکٹرز لکیری طور پر ترتیب دیے جاتے ہیں اور ہر ڈیٹیکٹر زمین کے خلیے (پکسل) کے طول و عرض سے منعکس ہونے والی توانائی جمع کرتا ہے جو 20 میٹر کے نادیر کے نقطہ نظر پر ہوتا ہے۔
سیٹلائٹس کی ریزولوشن پاورز
سیٹلائٹ ریموٹ سینسنگ میں، سن سنکرونس قطبی مدار زمین کی سطح کے ایک ہی علاقے پر سیٹلائٹ کے از خود طے شدہ وقفے کے بعد تصاویر جمع کرنے کی سہولت دیتا ہے جسے زمانی ریزولوشن یا دوبارہ ملنے کا وقت کہا جاتا ہے۔ شکل 6.9 ایک ہی علاقے کے لیے وقت کے دو مختلف ادوار میں حاصل کی گئی دو تصاویر کو دکھاتی ہے، جس سے ہمالیہ میں پودوں کی اقسام کے حوالے سے ہونے والی تبدیلیوں کا مطالعہ اور ریکارڈ کرنا ممکن ہوتا ہے۔ ایک اور مثال میں، شکل 6.10 ($a$ اور ب) بحر ہند میں سونامی سے پہلے اور بعد میں حاصل کی گئی تصاویر دکھاتی ہے۔ جون 2004 میں حاصل کی گئی تصویر واضح طور پر انڈونیشیا میں باندا آچے کی غیر متزلزل topography دکھاتی ہے، جبکہ سونامی کے فوراً بعد حاصل کی گئی پوسٹ سونامی امیج سونامی کے باعث ہونے والے نقصانات کو ظاہر کرتی ہے۔

شکل 6.9 ہمالیہ اور شمالی ہندوستانی میدان کی آئی آر ایس سیٹلائٹ کے ذریعے مئی (بائیں) اور نومبر (دائیں) میں لی گئی تصاویر پودوں کی اقسام میں فرق دکھاتی ہیں۔ مئی کی تصویر میں سرخ دھبے صنوبری نباتات کی طرف اشارہ کرتے ہیں۔ نومبر کی تصویر میں اضافی سرخ دھبے پت جھڑ پودوں کی طرف اشارہ کرتے ہیں اور ہلکا سرخ رنگ فصلوں سے متعلق ہے۔

شکل 6.10 (الف) جون 2004 میں حاصل کی گئی پری سونامی امیج

شکل 6.10 (ب) دسمبر 2004 میں حاصل کی گئی پوسٹ سونامی امیج
سینسر ریزولوشنز
ریموٹ سینسرز کو مکانی، سپیکٹرل اور ریڈیومیٹرک ریزولوشنز کی خصوصیت حاصل ہوتی ہے جو مختلف زمینی حالات سے متعلق مفید معلومات کے استخراج کو ممکن بناتی ہیں۔
(i) مکانی ریزولوشن: آپ نے کچھ لوگوں کو کتاب یا اخبار پڑھتے وقت چشمے استعمال کرتے دیکھا ہوگا۔ کیا آپ نے کبھی سوچا ہے کہ وہ ایسا کیوں کرتے ہیں؟ یہ محض اس حقیقت کی وجہ سے ہے کہ ان کی آنکھوں کی ایک لفظ میں قریب سے فاصلہ رکھنے والے دو حروف میں فرق کرنے کی طاقت انہیں دو مختلف حروف کے طور پر شناخت کرنے سے قاصر ہوتی ہے۔ مثبت چشمے استعمال کر کے وہ اپنی بینائی کے ساتھ ساتھ ریزولوشن پاور کو بہتر بنانے کی کوشش کرتے ہیں۔ ریموٹ سینسنگ میں، سینسرز کا مکانی ریزولوشن اسی مظہر سے مراد ہے۔ یہ سینسر کی وہ صلاحیت ہے کہ وہ قریب سے فاصلہ رکھنے والی دو شے کی سطحوں کو دو مختلف شے کی سطحوں کے طور پر ممتاز کر سکے۔ ایک اصول کے طور پر، بڑھتی ہوئی ریزولوشن کے ساتھ چھوٹی چھوٹی شے کی سطحوں کی شناخت بھی ممکن ہو جاتی ہے۔
(ii) سپیکٹرل ریزولوشن: یہ EMR (برقی مقناطیسی تابکاری) کے مختلف بینڈز میں سینسر کی حسی اور ریکارڈنگ پاور سے مراد ہے۔ ملٹی سپیکٹرل امیجز ایک ایسے آلے کا استعمال کرتے ہوئے حاصل کی جاتی ہیں جو سینسر کے ذریعے موصول ہونے والی تابکاری کو منتشر کرتا ہے اور مخصوص سپیکٹرل رینجز کے لیے حساس ڈیٹیکٹرز تعینات کر کے اسے ریکارڈ کرتا ہے۔ ایسی تصاویر حاصل کرنے کے اصول فطرت میں روشنی کے انتشار، جس کے نتیجے میں ‘قوس قزح’ ظاہر ہوتی ہے، اور لیب میں پرزم کے استعمال کی توسیع ہیں (باکس 6.2)۔
مختلف بینڈز میں حاصل کی گئی تصاویر اشیاء کے رد عمل کو مختلف طریقے سے دکھاتی ہیں جیسا کہ ریموٹ سینسنگ ڈیٹا حصول کے مراحل کے پیرا 3 میں بحث کی گئی ہے۔ شکل 6.11 آئی آر ایس پی - 6 (ریسورس سیٹ - 1) کے ذریعے مختلف سپیکٹرل علاقوں میں حاصل کی گئی تصاویر دکھاتی ہے جو بینڈ 4 (زیریں سرخ) میں تازہ پانی کی مضبوط جذب خصوصیات اور بینڈ 2 (سبز) میں خشک سطحوں کے ذریعے مخلوط مضبوط عکس کو ظاہر کرتی ہیں (شکل 6.11)۔
(iii) ریڈیومیٹرک ریزولوشن: یہ سینسر کی دو ہدفوں کے درمیان امتیاز کرنے کی صلاحیت ہے۔ ریڈیومیٹرک ریزولوشن جتنی زیادہ ہوگی، دو ہدفوں کے درمیان پائے جانے والے تابکاری کے فرق اتنا ہی چھوٹا ہوگا۔
دنیا کے کچھ ریموٹ سینسنگ سیٹلائٹس کے مکانی، سپیکٹرل اور ریڈیومیٹرک ریزولوشنز ٹیبل 6.1 میں دکھائے گئے ہیں۔
ٹیبل 6.1 لینڈ سیٹ، آئی آر ایس اور SPOT سینسرز کے مکانی، سپیکٹرل اور ریڈیومیٹرک ریزولیشن
| سیٹلائٹ/سینسر | مکانی ریزولوشن (میٹر میں) |
بینڈز کی تعداد |
ریڈیومیٹرک رینج (گرے لیول تغیرات کی تعداد) |
|---|---|---|---|
| لینڈ سیٹ MSS (USA) | $80.0 \times 80.0$ | 4 | $0-64$ |
| آئی آر ایس LISS - I (India) | $72.5 \times 72.5$ | 4 | $0-127$ |
| آئی آر ایس LISS - II (India) | $36.25 \times 36.25$ | 4 | $0-127$ |
| لینڈ سیٹ TM (USA) | $30.00 \times 30.00$ | 4 | $0-255$ |
| آئی آر ایس LISS III (India) | $23.00 \times 23.00$ | 4 | $0-127$ |
| SPOT HRV - I (France) | $20.00 \times 20.00$ | 3 | $0-255$ |
| SPOT HRV - II (France) | $10.00 \times 10.00$ | 1 | $0-255$ |
| آئی آر ایس PAN (India) | $5.80 \times 5.80$ | 1 | $0-127$ |
باکس 6.2
قوس قزح (روشنی کا قدرتی انتشار)
پرزم (روشنی کا مصنوعی انتشار)
روشنی کا انتشار (وہ اصول جو ملٹی سپیکٹرل امیجز حاصل کرنے میں استعمال ہوتا ہے)
بڑی تعداد میں بینڈز میں تصاویر حاصل کرنے کا مجموعی میکانزم روشنی کے انتشار کے اصول سے قوت حاصل کرتا ہے۔ آپ نے قوس قزح ضرور دیکھی ہوگی۔ یہ فضا میں موجود پانی کے مالیکیولز کے ذریعے روشنی کی شعاعوں کے قدرتی عمل کے ذریعے بنتی ہے۔ اسی مظہر کا تجربہ ایک پرزم کے ایک طرف روشنی کی شعاع ڈال کر کیا جا سکتا ہے۔ پرزم کے دوسری طرف آپ توانائی کے سات رنگوں میں انتشار دیکھ سکتے ہیں جو سفید روشنی بناتے ہیں۔


شکل 6.11 آئی آر ای



